
回收西门子数控模块、模拟量模块、触摸屏
回收西门子CPU模块,回收西门子触摸屏,西门子模块回收
回收西门子数控模块、模拟量模块、触摸屏
回收西门子CPU模块,回收西门子触摸屏,西门子模块回收
①判断驱动是否通信正常,正常为 True
②判断驱动参数是否传递正常或无需传递,传递正常值为 2,无需传递值为 3
③判断编码器状态是否有效,有效值为 2
④判断编码器是否通信正常,正常为 True
⑤判断编码器参数是否传递正常或无需传递,传递正常值为 2,无需传递值为 3
上述 ② 驱动与 ⑤ 编码器参数传递,取决于轴工艺对象组态“运行时自动应用驱动/编码器值(在线)”,如图 16 所示红框。如果需要在线传递驱动/编码器参数则激活该选项,如果无需传递则不激活。
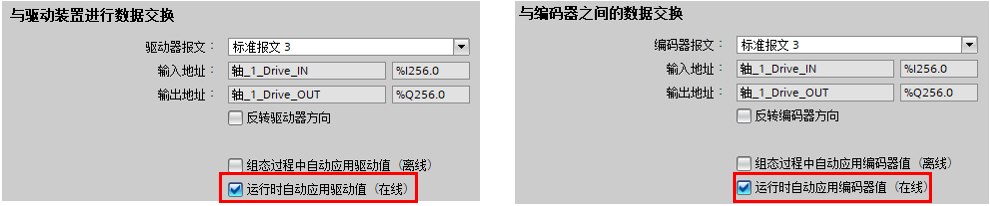
图 16. 运行时自动应用
考虑到可能会在运行时取消驱动器使能,这样可以在使能条件前加用户条件,当条件满足时再使能,可以参考如图 17 的程序。
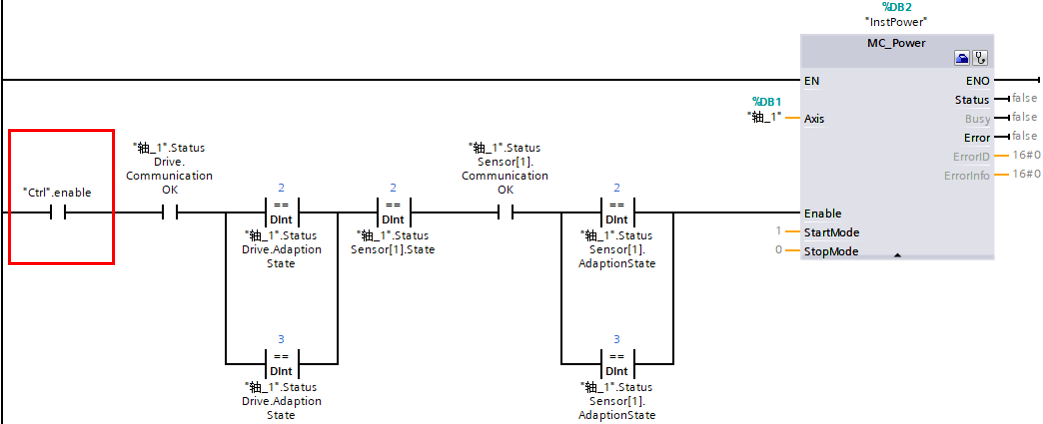
图 17. 使能程序
11. 如何对运动控制指令使用 FB 进行封装?答:
如果在有多个轴,并且每个轴都使用很多 MC 的指令时,通常会考虑对使用的 MC 指令使用 FB 进行封装,以多重背景的方式调用,而非产生很多的背景数据块。对于一些设定控制位、设定值,例如使能、触发或者速度、位置等可以很方便的在 FB 的输入上定义,除此以外,对于轴参数也需要定义在接口参数中,否则该 FB 就无法实现多次调用。
轴参数的类型是 TO_PositioningAxis,可以在 FB 输入或者输入输出参数予以使用,如图 18 所示。
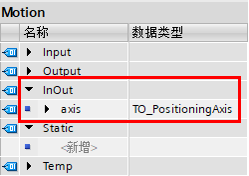
图 18. 定义接口
如果参数类型太长记不住,可以按照如图 19 所示的方法找到该类型,复制到块接口即可。
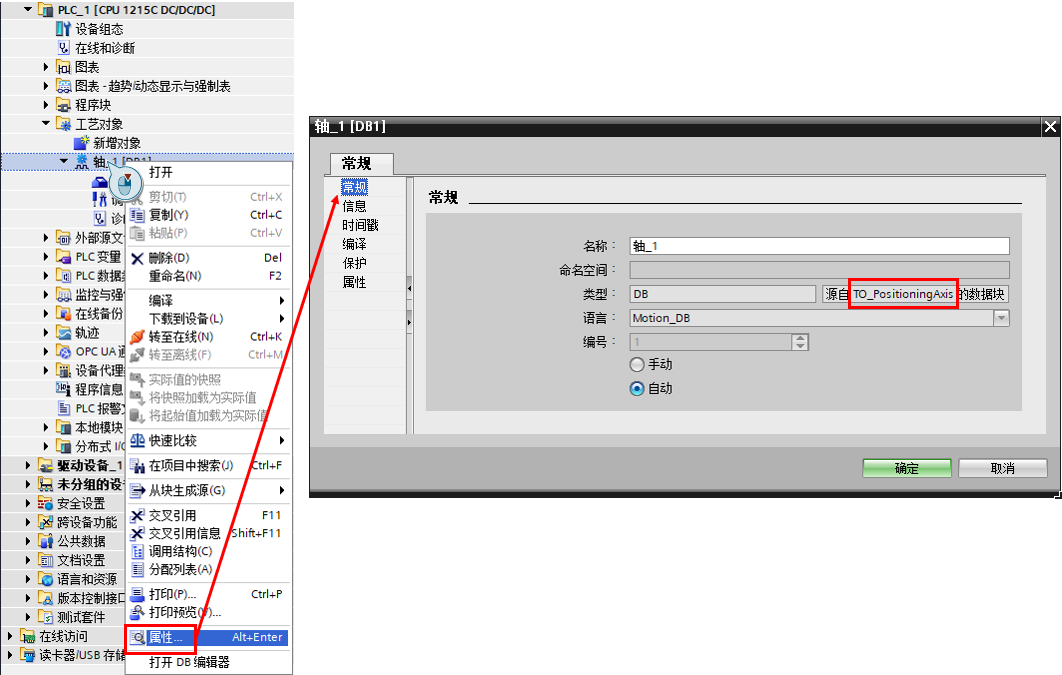
图 19. 接口参数
这样就可以在调用 FB 时,方便的把轴工艺 DB 作为 FB 的实参使用了,如图 20 所示。
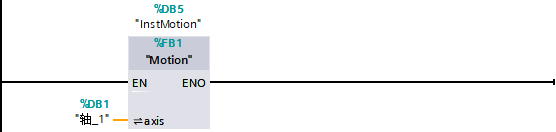
图 20. 调用 FB
除此以外,命令表参数的类型是 TO_CommandTable,同样也可以使用图 19 的方式在命令表工艺对象 DB 处获取。
此外,DB_ANY 也可以应用在运动控制指令封装 FB 中,xiangbaijiao